Purik Sensor System: Design, Development, and Demonstration
The Purik Sensor System is a compact, modular technology demonstrator that models core features of combat aircraft sensor suites. It implements real-time sensor acquisition, embedded computing, and wireless data transmission using modular components and an open-architecture operating system.
Design and Architecture
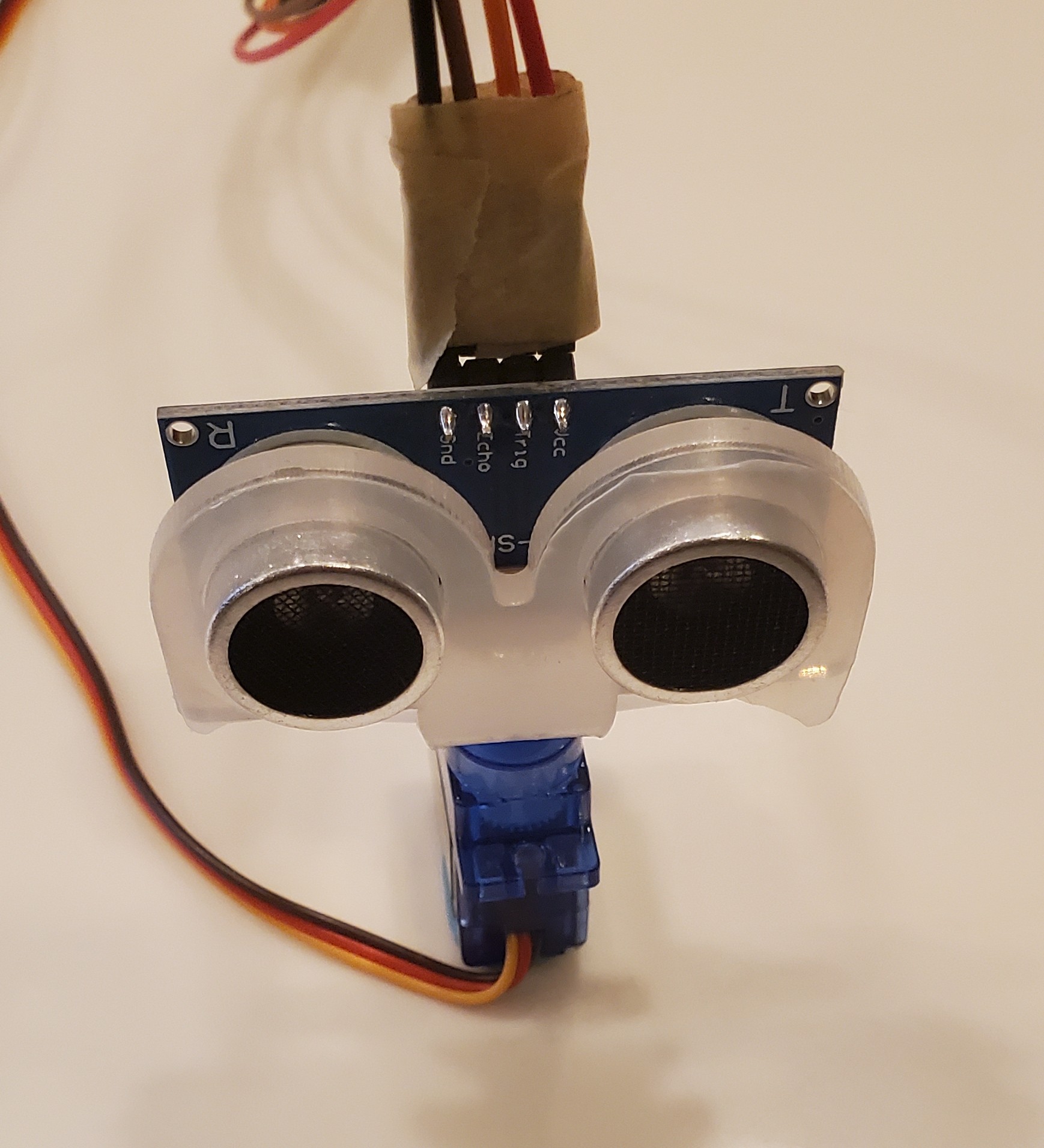
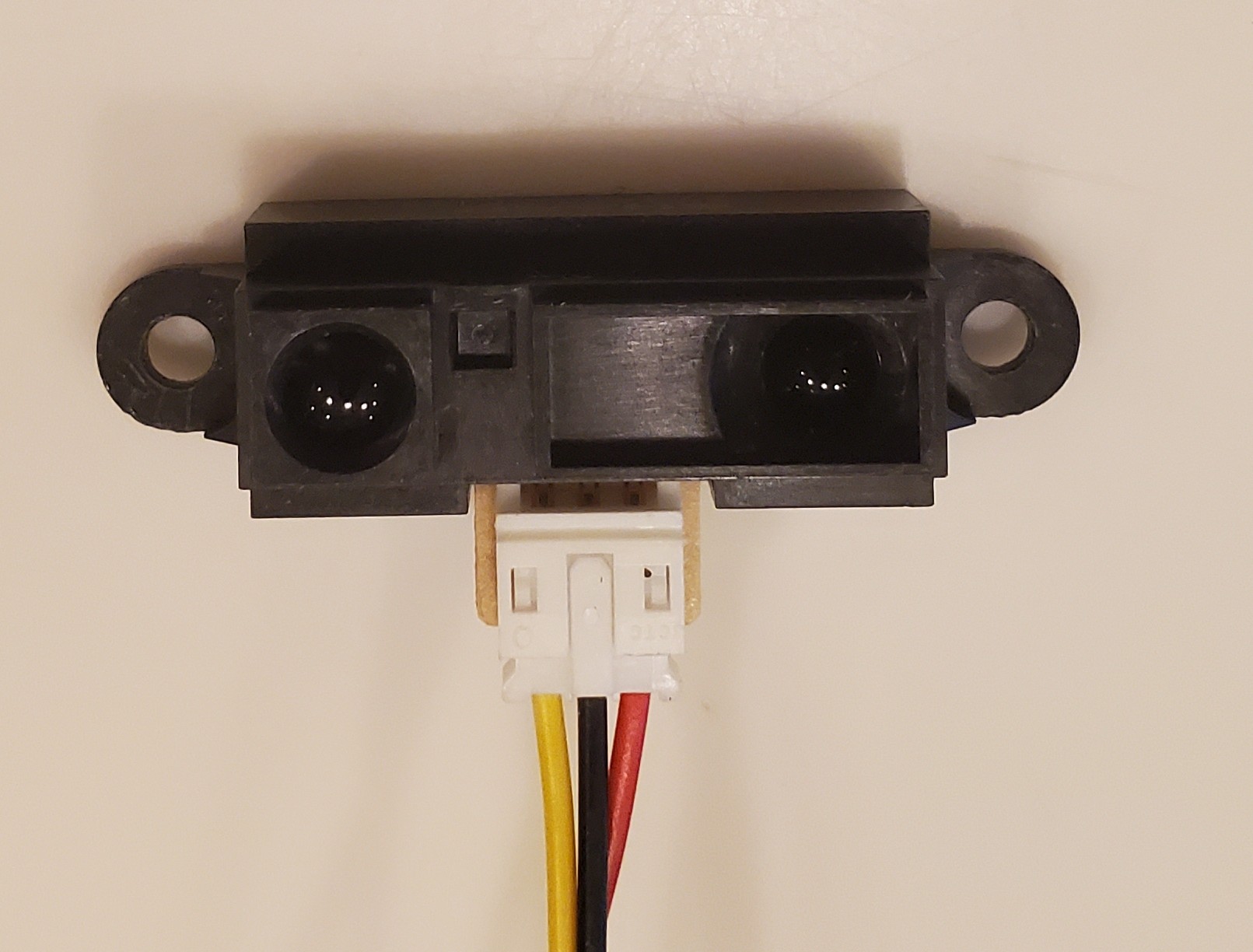
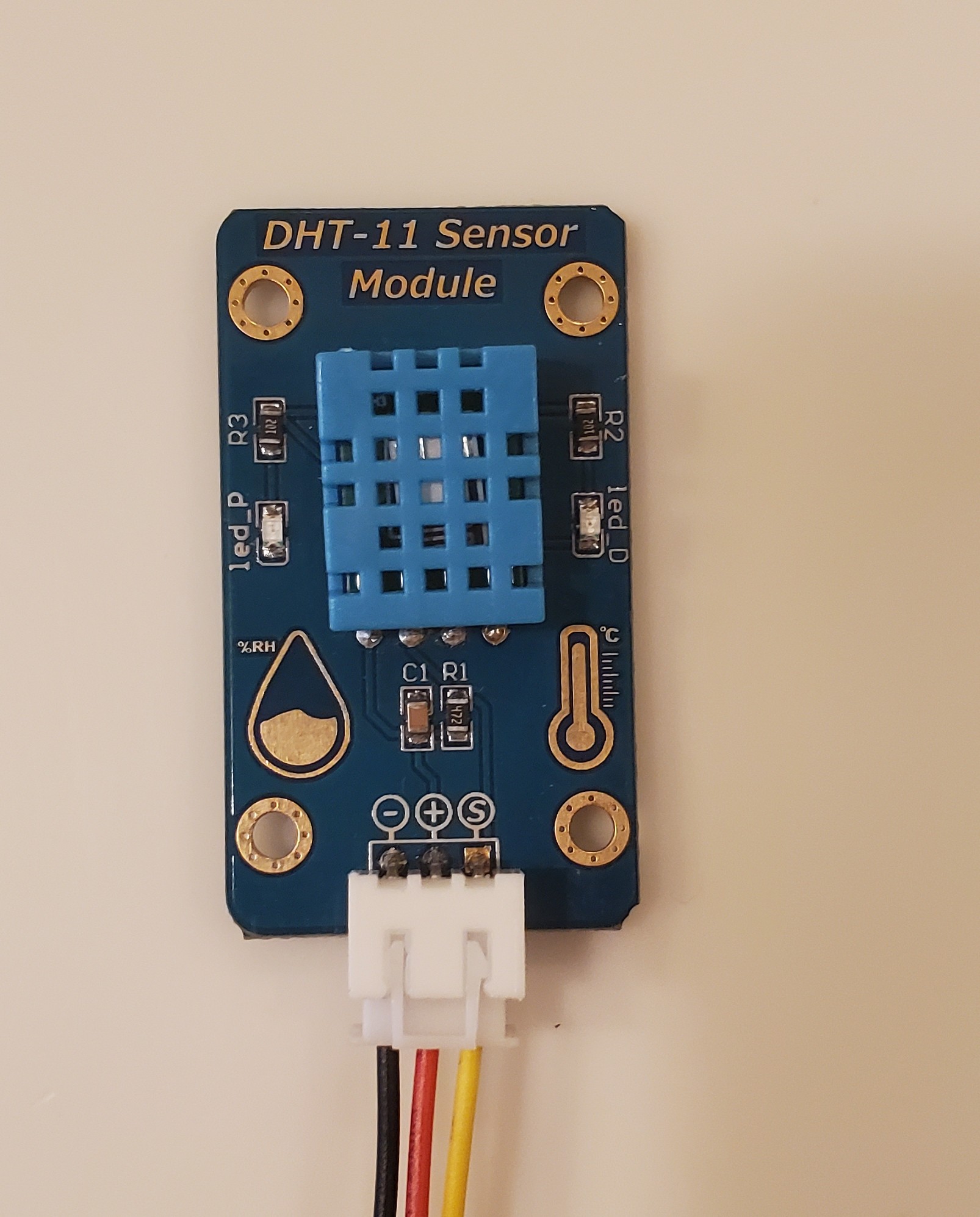
Built on the Arduino Uno R4 WiFi platform, the system integrates sensors such as the HC-SR04 ultrasonic module in a simple radar setup, IR proximity sensors, a DHT11 temperature-humidity sensor, and servo-controlled directional scanning. The modular design allows plug-and-play integration of new sensors for mission-specific scenarios.
Development Framework
Each component of the system is supported by dedicated firmware modules (e.g., SensorConfig.h, Dashboard.cpp, and WiFiSetup.cpp), ensuring scalable development and real-time HTTP communication. Data is visualized through a standalone Python or web-based dashboard that emulates combat aircraft UIs.
Applications and Demonstrations
The Purik platform is used in engineering education, public demonstrations, and modular sensor prototyping. It serves as a simplified analog to advanced embedded avionics found in systems like the F-35, enabling students and researchers to explore sensor fusion, real-time telemetry, and system modularity in a low-risk, low-cost environment.
Future Vision
Future iterations of the Purik Sensor System will support LiDAR integration, RF communication via NRF24L01 modules, and machine learning data analysis. These upgrades will further enhance the platform’s ability to model collaborative combat aircraft technologies in next-gen air battlespace scenarios.
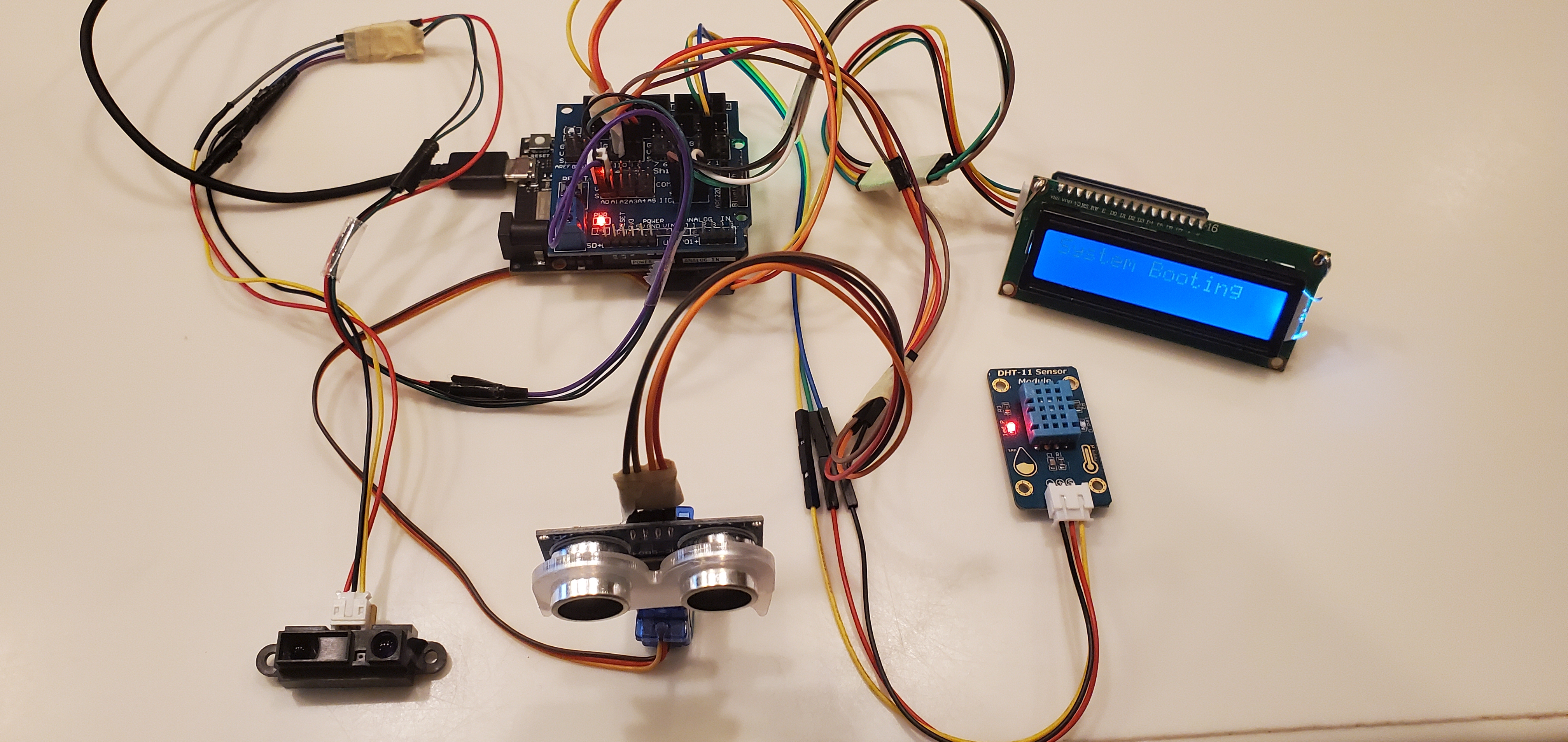
Hardware Components and Integration
The Purik Sensor System includes a modular array of sensors connected to the Arduino Uno R4 WiFi. Below are labeled photos from the experimental testbed.

System Integration Overview
This development follows a phased integration strategy, as outlined in the internal test memo (XTI-1, Jan 2025). The final configuration includes 5+ sensor nodes linked via a central hub, with expansion paths toward RF communication and LiDAR signal analysis.
Download the full integration planning document (PDF)